Если вы занимаетесь разработкой роботов или автопилотов, то вы наверняка уже слышали о Фильтре Калмана. Но что это такое и как он работает?
Обычно, при знакомстве c Фильтром Калмана, обывателя встречает множество сложных формул. В данной статье мы объясним эти математические понятия простыми словами на конкретных примерах.
Что такое Фильтр Калмана?
Фильтр Калмана — это математический алгоритм, который позволяет оценивать состояние системы на основе неполной, зашумленной информации. Это может быть любая система, которую нужно контролировать или управлять (робот, дрон, автомобиль или процесс в производственной линии).
Фильтр Калмана был разработан Рудольфом Калманом в 1960 году и стал широко использоваться во многих областях, включая авиацию, автомобильную промышленность, медицину и даже бытовую технику. Он позволяет получать более точную оценку состояния системы, чем простое считывание данных с сенсоров.
Рисунок 2 – Рудольф Калман
Как работает Фильтр Калмана?
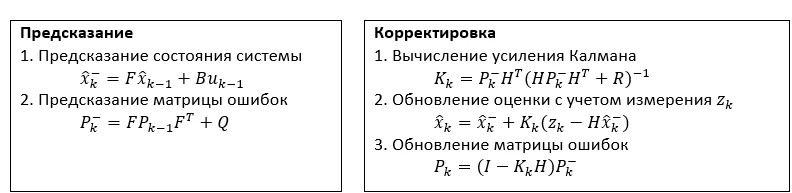
Фильтр Калмана работает на основе принципа прогнозирования и корректировки. Сначала он прогнозирует будущее состояние системы на основе текущего состояния и информации о ее движении. Затем он корректирует этот прогноз на основе новой информации от сенсоров.
Каким образом происходит прогнозирование будущего или осознание текущего состояния системы? Для начала разберем необходимую терминологии из теории вероятностей.
1. Немного из теории вероятности:
Если много раз измерять какую-то величину, то получится множество точек, разбросанных вокруг этой величины. Такие измерения, в большинстве случаев, описываются нормальным законом распределения, а функция, которая их описывает называется кривой Гаусса (Гауссианом).
На рисунке показан нормальный закон распределения случайной величины X в виде гистограммы. Горизонтальная ось показывает измеренное значение, а вертикальная – количество измерений, попавших в интервал и нормированное по высоте таким образом, чтобы площадь под графиком была равна единице.
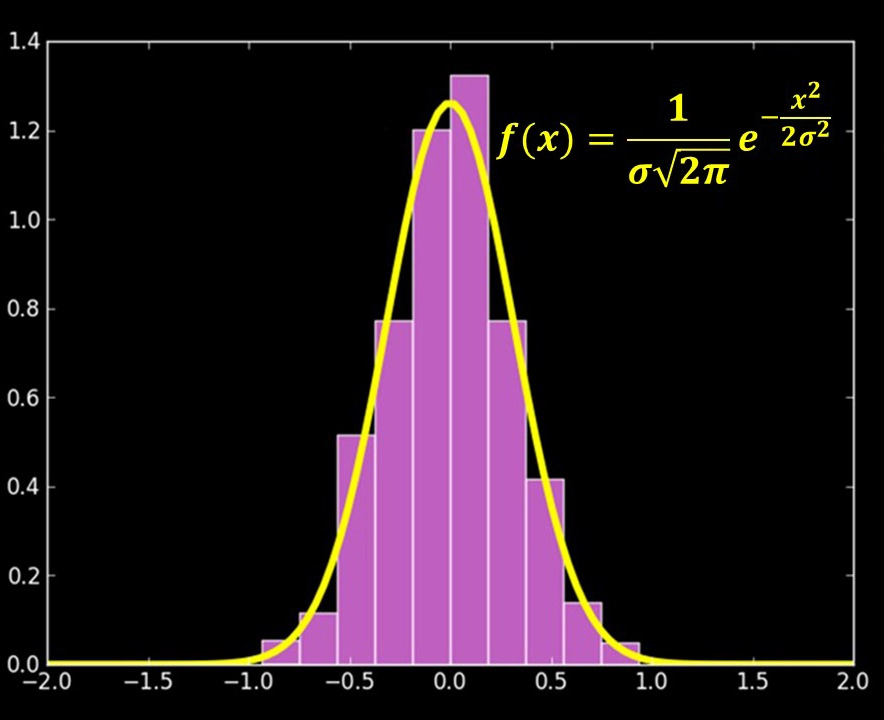
Это делается для того, чтобы кривая Гауссиана представляла собой функцию распределения вероятностей.
У гауссиана есть два основных параметра:
– математическое ожидание (середина графика, на рисунке 3 – это ноль)
– среднеквадратическое отклонение (сигма, σ).
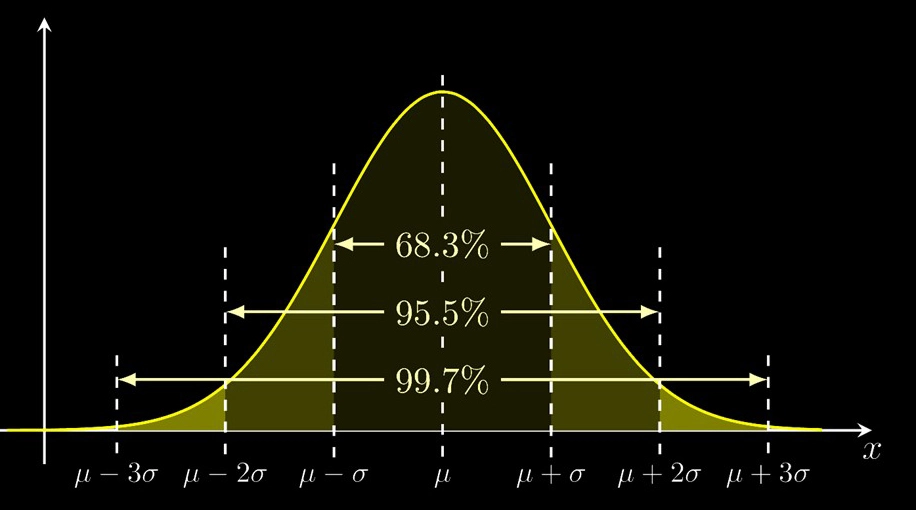
В зависимости от математического ожидания и сигмы гауссианы имеют разную форму и “центр” (рисунок 4).
Чем меньше сигма, тем выше и тоньше гауссиан. При этом площадь под гауссианом, описывающим распределение величины, всегда одинакова и равна единице.

Как параметр среднеквадратическое отклонение (сигма, σ) соотносится с гауссианом?
Для любого гауссиана отрезок ±σ содержит 68,3% площади под графиком, для интервала ±3σ это значение уже 99,7%. Это означает, что 99,7% всех измерений лежит в промежутке от минус трёх до трёх сигм.
Полностью
https://mp-lab.ru/filtr_kalmana_dlya_nachinayushchih/

